四、代码结构(2)空间管理器
这一篇和下一篇我们来介绍dm dedup的空间管理的部分和核心流程的I/O写流程
在此之前,我们先分析一下用到的资源有哪些,和了解dm dedup的空间管理器空间管理器
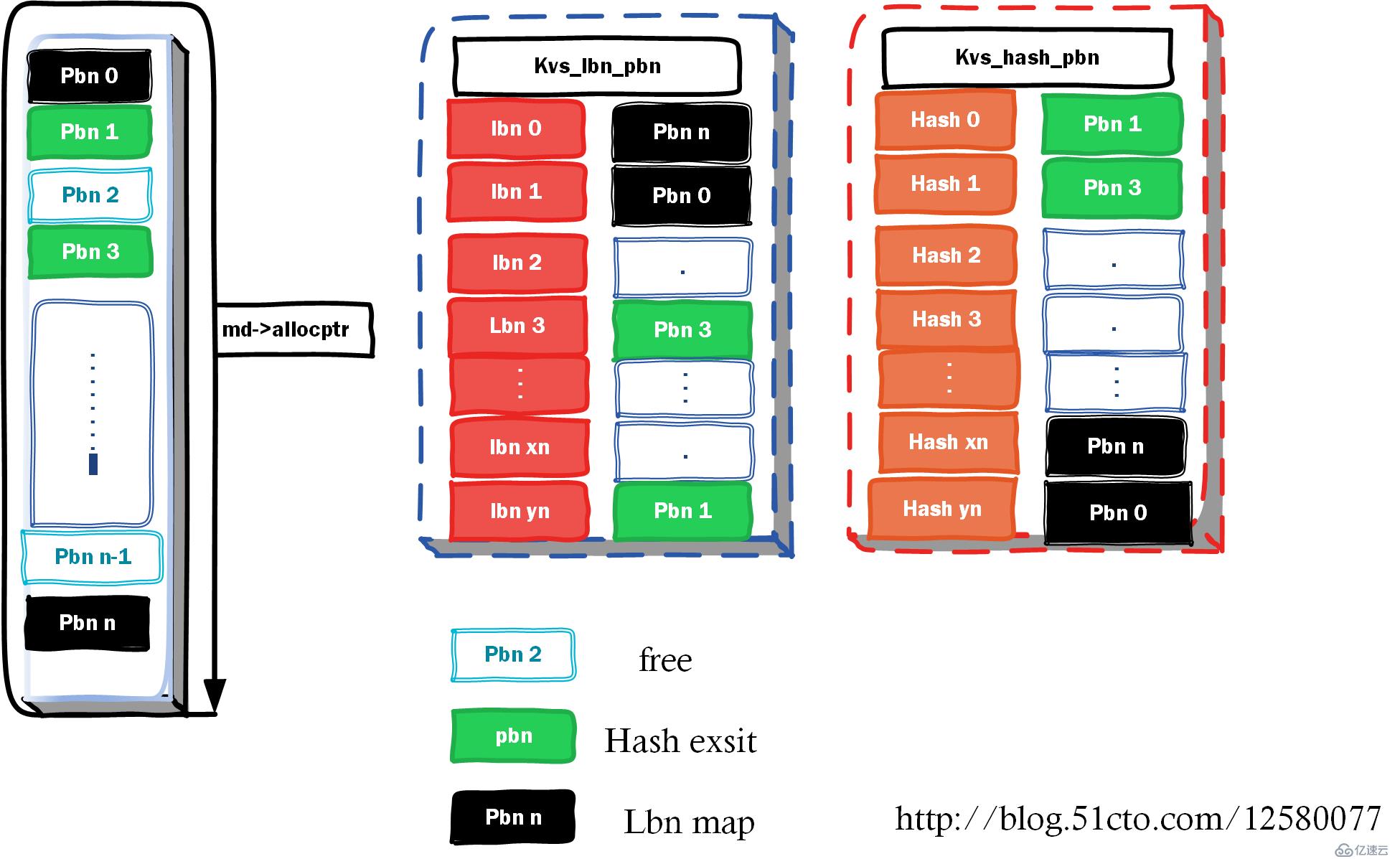
空间管理器,是一个巨型的数组,以allocptr申请指针为标,对整个空间进行扫描一周(回到当前allocptr)。
用来找到空闲的块(白色),并把它分配给一个散列的要求,把它变成一个绿色的块,并把这个信息hash_pbn,放到kvs_hash_pbn的表内。
kvs_lbn_pbn和kvs_hash_pbn的空间是预先分配好的,所以这两个表的索引都是有确定的含义,非常利于查找。
<代码>直流→kvs_hash_pbn=直流→mdops→kvs_create_sparse(医学博士,crypto_key_size, sizeof (struct hash_pbn_value),直流→pblocks,无格式); 直流→kvs_lbn_pbn=直流→mdops→kvs_create_linear(医学博士,8,sizeof (struct lbn_pbn_value),直流→lblocks,无格式),
在创建变电站(键值空间)的时候,有两种选择,一种是按线性就照是一一映射的lbn-pbn的方式,还有一种是散列索引的方式。
其中都会将ksize和vsize会在两种空间类型不同而会以不同的方式保存。
①kvs-lbn-pbn,线性的创造空间方式inram
<代码>静态结构kvstore * kvs_create_linear_inram (* md结构元数据,u32 ksize, u32 vsize, u32 kmax, bool无格式)
{
struct kvstore_inram *变电站;
u64 kvstore_size tmp;
变电站=kmalloc (sizeof(*变电站),GFP_NOIO);
如果变电站(!)
返回ERR_PTR (-ENOMEM);
kvstore_size=(kmax + 1) * vsize;
变电站→存储=vmalloc (kvstore_size);/*确定变电站→存储的大小,这里的思想很简单,
就是64位的lbn寻址到一个ksize的pbn上面,一般的pbn也是64位*//* kmax是逻辑设备的大小,这个映射表的含义就是lbn-pbn的映射关系*/tmp=kvstore_size;
(空白)do_div (tmp (1024 * 1024));
memset(变电站→存储、EMPTY_ENTRY kvstore_size);
变电站→ckvs。vsize=vsize;
变电站→ckvs。ksize=ksize;
变电站→kmax=kmax;
变电站→ckvs。kvs_insert=kvs_insert_linear_inram;*//*插入api
变电站→ckvs。kvs_lookup=kvs_lookup_linear_inram;*//*查找api
变电站→ckvs。kvs_delete=kvs_delete_linear_inram;*//*删除api
变电站→ckvs。kvs_iterate=kvs_iterate_linear_inram;*//*迭代api
md→kvs_linear=变电站;
返回,(变电站→ckvs);
}
我们简单看一看kvs_insert_linear_inram和kvs_lookup_linear_inram,删除和迭代留在垃圾回收的部分介绍。
<代码>静态int kvs_insert_linear_inram (struct kvstore *变电站,void *键,s32 ksize, void *价值,int32_t vsize)
{
u64 idx;
char * ptr;
struct kvstore_inram * kvinram=零;
kvinram=container_of(变电站、结构kvstore_inram ckvs);
idx=* ((uint64_t *)键);
ptr=kvinram→存储+变电站→vsize * idx;/*以lbn为关键,pbn为价值的地图*/memcpy (ptr、价值、变电站→vsize);
返回0;
}
插入的代码非常简单,就可以理解成线性是个u64变电站[kmax]这样的数组,lbn是数组下标,而价值是数组内容。
<代码>静态int kvs_lookup_linear_inram (struct kvstore *变电站,void *键,
s32 ksize, void *价值,
int32_t * vsize)
{
u64 idx;
char * ptr;
int r=-ENODATA;
struct kvstore_inram * kvinram=零;
kvinram=container_of(变电站、结构kvstore_inram ckvs);
idx=* ((uint64_t *)键);
ptr=kvinram→存储+变电站→vsize * idx;
如果(is_empty (ptr,变电站→vsize))
返回r;
memcpy(价值、ptr、变电站→vsize);
* vsize=变电站→vsize;
返回0;
}
②kvs-hash-pbn,稀疏的创造空间方式inram
稀疏的方式和线性不太一样,它的组织形式会更加复杂一些
他要存键和值两个,key_size是采用哈希算法的大小,如:md5是128位,价值是pbn是64位
<代码>静态结构kvstore * kvs_create_sparse_inram (* md结构元数据,
u32 ksize, u32 vsize,
u32 knummax bool无格式)
{
struct kvstore_inram *变电站;
u64 kvstore_size tmp;
变电站=kmalloc (sizeof(*变电站),GFP_NOIO);/* knummax关键的最大值这里是按照pbn的最大值申请的,物理设备的大小*/knummax +=(knummax * HASHTABLE_OVERPROV)/100/*额外申请了十分之一的空间*/kvstore_size=(knummax * (vsize + ksize));/*申请单位是vsize (pbn) 64位ksize (hash_size) 128位*/变电站→存储=vmalloc (kvstore_size);
tmp=kvstore_size;
(空白)do_div (tmp (1024 * 1024));
memset(变电站→存储、EMPTY_ENTRY kvstore_size);/*将所有的关键都预先变成EMPTY_ENTRY=0 xfb(最新的代码4.13是0 xff) */变电站→ckvs。vsize=vsize;
变电站→ckvs。ksize=ksize;
变电站→kmax=knummax;
变电站→ckvs。kvs_insert=kvs_insert_sparse_inram;*//*插入api
变电站→ckvs。kvs_lookup=kvs_lookup_sparse_inram;*//*查找api
变电站→ckvs。kvs_delete=kvs_delete_sparse_inram;*//*删除api
变电站→ckvs。kvs_iterate=kvs_iterate_sparse_inram;*//*迭代api
md→kvs_sparse=变电站;
返回,(变电站→ckvs);
}
名为块级重删(dm dedup) & lt; 3祝辞代码结构(2)