<强>知识掌握
<强> cv2.threshold()函数:
设置固定级别的阈值应用于多通道矩阵,将灰度图像变换二值图像,或去除指定级别的噪声,或过滤掉过小或者过大的像素点。
在其中:
src:表示的是图片源
打:表示的是阈值(起始值)
maxval:表示的是最大值
类型:表示的是这里划分的时候使用的是什么类型的算法,常用值为0 (cv2.THRESH_BINARY)
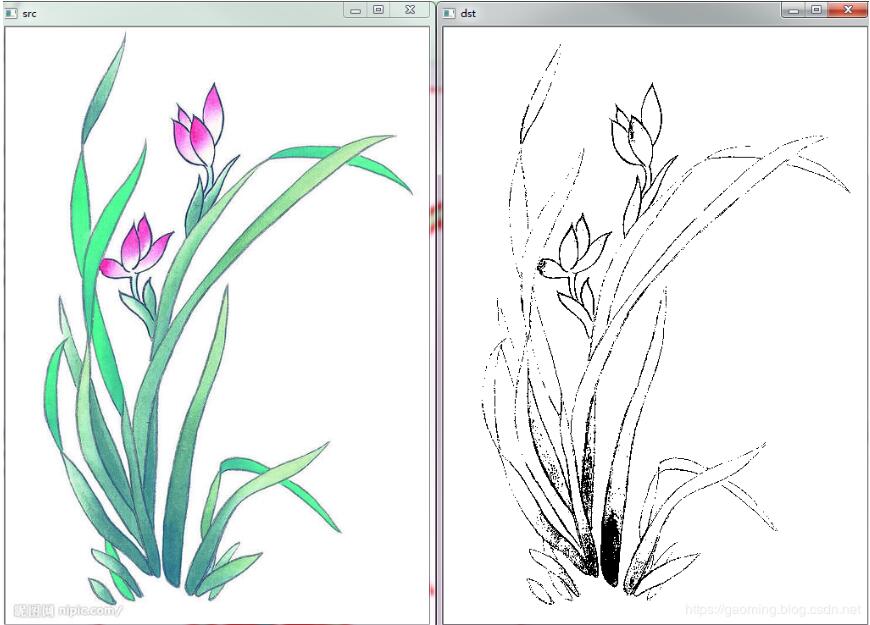
<强> cv2.findContours()函数:
<强>查找检测物体的轮廓
opencv2返回两个值:轮廓:层次结构。
<强> opencv3会返回三个值,分别是img,轮廓,层次
在其中:
<强>图片:表示的是寻找轮廓的图像;
<强>模式:表示的是轮廓的检索模式,有四种:
cv2.RETR_EXTERNAL表示只检测外轮廓
cv2.RETR_LIST检测的轮廓不建立等级关系
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE建立一个等级树结构的轮廓。
<强>方法:表示的是轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即马克斯(abs (x1, x2)), abs (y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2。CHAIN_APPROX_TC89_L1, CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl链近似算法

<强> cv2.polylines函数:
<强>绘制多边形
首先需要顶点坐标。将这些点转换为rowsx1x2形状的数组,其中行是顶点数,它应该是int32类型。
如果第三个参数为假,您将获得连接所有点的折线,而不是闭合形状。
cv2.polylines()可用于绘制多条线。只需创建要绘制的所有行的列表并将其传递给函数,所有线条都将单独绘制。绘制一组行比为每行调用cv2.line()要好得多,速度更快。

<强> cv2.fillPoly)函数
可以用来填充任意形状的图型。可以用来绘制多边形,工作中也经常使用非常多个边来近似的画一条曲线.cv2.fillPoly()函数可以一次填充多个图型。