介绍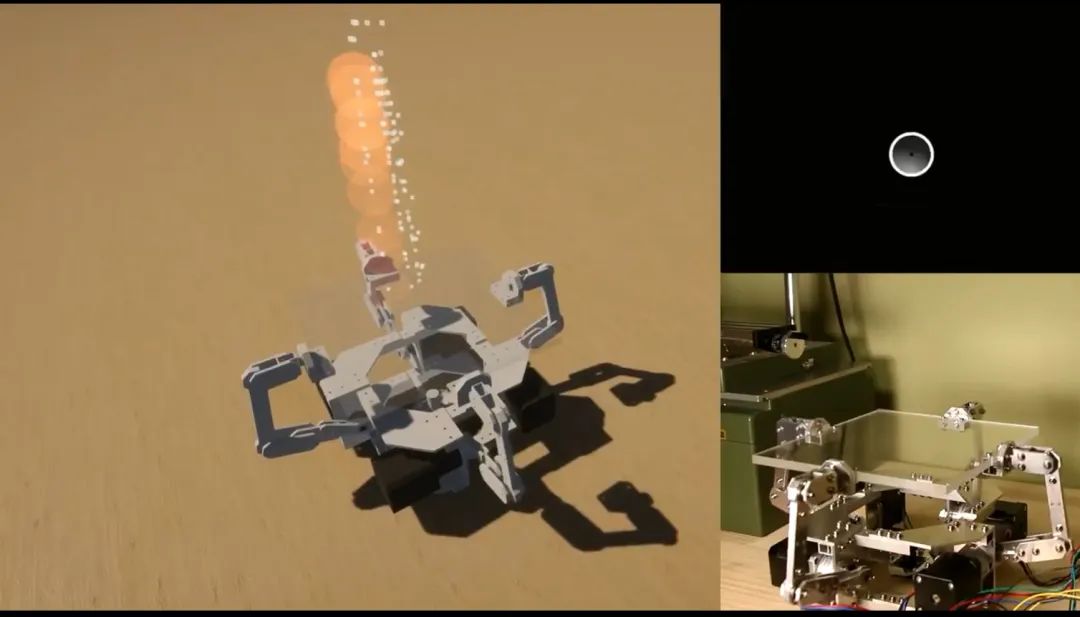 <李>
<李> 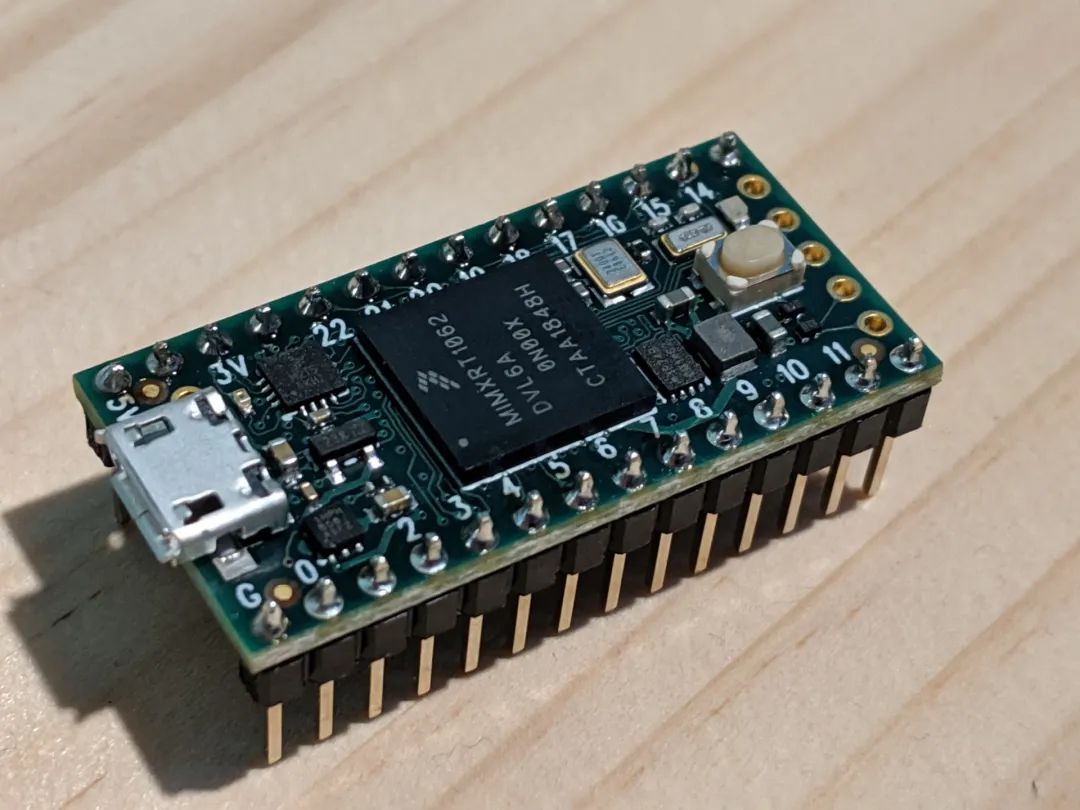 以上就是基于Arduino + OpenCV的颠球机器人是怎样的,小编相信有部分知识点可能是我们日常工作会见到或用到的。希望你能通过这篇文章学到更多知识。更多详情敬请关注行业资讯频道。
以上就是基于Arduino + OpenCV的颠球机器人是怎样的,小编相信有部分知识点可能是我们日常工作会见到或用到的。希望你能通过这篇文章学到更多知识。更多详情敬请关注行业资讯频道。
本篇文章给大家分享的是有关基于Arduino + OpenCV的颠球机器人是怎样的,小编觉得挺实用的,因此分享给大家学习,希望大家阅读完这篇文章后可以有所收获,话不多说,跟着小编一起来看看吧。
<节>17年电赛那个题目,常用的解决方案是把摄像头放在上面,而且小球只在平板上进行二维运动。这个项目是把摄像头放在了透明玻璃的下面,小球的高度和和摄像头采集的小球图像大小成比例关系,在二维运动的基础上升级为了三维立体运动。
<人物> <李> 1块小小的4.0开发板,主频600 mhz,基于我。MX RT1060,可以使用Arduino开发。
<李>1个DM442S步进电机驱动器,可同时驱动4路步进电机
<李>4个Nema 17 42步进电机
<李>1 8个48 v的电源
<李>1个高分辨率的See3CAM_CU135摄像头
<李>1台安装OpenCV的Windows电脑主机
4.0很小的开发板,使用NXP RT1062,可以当做Arduino来使用。
<人物>以上就是基于Arduino + OpenCV的颠球机器人是怎样的,小编相信有部分知识点可能是我们日常工作会见到或用到的。希望你能通过这篇文章学到更多知识。更多详情敬请关注行业资讯频道。