<强>一、简介
是从一个顶点到其余各顶点的最短路径算法,解决的是有向图中最短路径问题。迪杰斯特拉算法主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止
<强>二,步骤
(1)找出“最便宜”的节点,即可在最短时间内到达的节点。
(2)更新该节点的邻居的开销,其含义将稍后介绍。
(3)重复这个过程,直到对图中的每个节点都这样做了。
(4)计算最终路径。
<强>三、图解
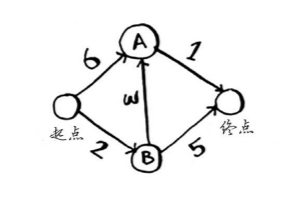
上图中包括5个节点,箭头表示方向,线上的数字表示消耗时间。
首先根据上图做出一个初始表(父节点代表从哪个节点到达该节点):
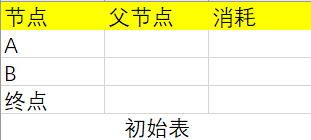
有了这个表我们可以根据算法的步骤往下进行了。
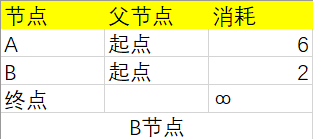
第一步:找出“最便宜”的节点,这里是节点B:
 # - *编码:utf - 8 - *
#用散列表实现图的关系
#创建节点的开销表,开销是指从“起”点到该节点的权重
图={}
图(“开始”)={}
图(“开始”)[a]=6
图["开始"][b]=2
图[a]={}
图[a]["结束")=1
图[b]={}
图[b] [a]=3
图[b]["结束"]=5
图(“结束”)={}
#无穷大
∞=浮动(正)
成本={}
成本[a]=6
成本[b]=2
["结束"]=无穷成本
#父节点散列的表
父母={}
父母[a]=翱肌?
父母[b]=翱肌?
父母(“结束”)=没有
#已经处理过的节点,需要记录
处理=[]
#找到开销最小的节点
def find_lowest_cost_node(成本):
#初始化数据
lowest_cost=无穷大
lowest_cost_node=没有
#遍历所有节点
节点的成本:
#该节点没有被处理
如果不是在处理节点:
#如果当前节点的开销比已经存在的开销小,则更新该节点为开销最小的节点
如果成本(节点)& lt;lowest_cost:
lowest_cost=成本(节点)
lowest_cost_node=节点
返回lowest_cost_node
#找到最短路径
def find_shortest_path ():
节点="结束"
shortest_path=(“结束”)
虽然父母(节点)!=翱肌?
shortest_path.append(父母(节点))
节点=父母(节点)
shortest_path.append(“开始”)
返回shortest_path
#寻找加权的最短路径
def dijkstra算法():
#查询到目前开销最小的节点
节点=find_lowest_cost_node(成本)
#只要有开销最小的节点就循环(这个而循环在所有节点都被处理过后结束)
虽然节点不是没有:
#获取该节点当前开销
成本=成本(节点)
#获取该节点相邻的节点
邻居=图(节点)
#遍历当前节点的所有邻居
在neighbors.keys n ():
#计算经过当前节点到达相邻结点的开销,即当前节点的开销加上当前节点到相邻节点的开销
new_cost=成本+邻居[n]
#如果经当前节点前往该邻居更近,就更新该邻居的开销
如果new_cost & lt;成本[n]:
[n]=new_cost成本
同号时将该邻居的父节点设置为当前节点
父母[n]=节点
#将当前节点标记为处理过
processed.append(节点)
#找出接下来要处理的节点,并循环
节点=find_lowest_cost_node(成本)
#循环完毕说明所有节点都已经处理完毕
shortest_path=find_shortest_path ()
shortest_path.reverse ()
打印(shortest_path)
#测试
迪杰斯特拉()
# - *编码:utf - 8 - *
#用散列表实现图的关系
#创建节点的开销表,开销是指从“起”点到该节点的权重
图={}
图(“开始”)={}
图(“开始”)[a]=6
图["开始"][b]=2
图[a]={}
图[a]["结束")=1
图[b]={}
图[b] [a]=3
图[b]["结束"]=5
图(“结束”)={}
#无穷大
∞=浮动(正)
成本={}
成本[a]=6
成本[b]=2
["结束"]=无穷成本
#父节点散列的表
父母={}
父母[a]=翱肌?
父母[b]=翱肌?
父母(“结束”)=没有
#已经处理过的节点,需要记录
处理=[]
#找到开销最小的节点
def find_lowest_cost_node(成本):
#初始化数据
lowest_cost=无穷大
lowest_cost_node=没有
#遍历所有节点
节点的成本:
#该节点没有被处理
如果不是在处理节点:
#如果当前节点的开销比已经存在的开销小,则更新该节点为开销最小的节点
如果成本(节点)& lt;lowest_cost:
lowest_cost=成本(节点)
lowest_cost_node=节点
返回lowest_cost_node
#找到最短路径
def find_shortest_path ():
节点="结束"
shortest_path=(“结束”)
虽然父母(节点)!=翱肌?
shortest_path.append(父母(节点))
节点=父母(节点)
shortest_path.append(“开始”)
返回shortest_path
#寻找加权的最短路径
def dijkstra算法():
#查询到目前开销最小的节点
节点=find_lowest_cost_node(成本)
#只要有开销最小的节点就循环(这个而循环在所有节点都被处理过后结束)
虽然节点不是没有:
#获取该节点当前开销
成本=成本(节点)
#获取该节点相邻的节点
邻居=图(节点)
#遍历当前节点的所有邻居
在neighbors.keys n ():
#计算经过当前节点到达相邻结点的开销,即当前节点的开销加上当前节点到相邻节点的开销
new_cost=成本+邻居[n]
#如果经当前节点前往该邻居更近,就更新该邻居的开销
如果new_cost & lt;成本[n]:
[n]=new_cost成本
同号时将该邻居的父节点设置为当前节点
父母[n]=节点
#将当前节点标记为处理过
processed.append(节点)
#找出接下来要处理的节点,并循环
节点=find_lowest_cost_node(成本)
#循环完毕说明所有节点都已经处理完毕
shortest_path=find_shortest_path ()
shortest_path.reverse ()
打印(shortest_path)
#测试
迪杰斯特拉()