监听器,字面上的理解就是监听观察某个事件(程序)的发生情况,当被监听的事件真的发生了的时候,事件发生者(事件源)就会给注册该事件的监听者(监听器)发送消息,告诉监听者某些信息,同时监听者也可以获得一份事件对象,根据这个对象可以获得相关属性和执行相关操作。
<>强监听器模型涉及以下三个对象,模型图如下:
(1)事件:用户对组件的一个操作,或者说程序执行某个方法,称之为一个事件,如机器人程序执行工作。
(2)事件源:发生事件的组件就是事件源,也就是被监听的对象,如机器人可以工作,可以跳的舞,那么就可以把机器人看做是一个事件源。
(3)事件监听器(处理器):监听并负责处理事件的方法,如监听机器人工作情况,在机器人工作前后做出相应的动作,或者获取机器人的状态信息。
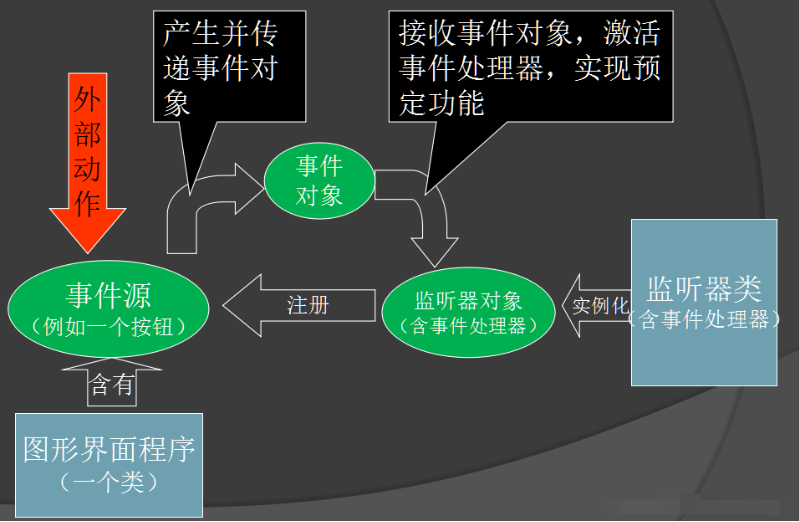
<>强执行顺序如下:
1,给事件源注册监听器。
2组件接受外部作用,也就是事件被触发。
3组件产生一个相应的事件对象,并把此对象传递给与之关联的事件处理器。
4,事件处理器启动,并执行相关的代码来处理该事件。
监听器模式:事件源注册监听器之后,当事件源触发事件,监听器就可以回调事件对象的方法;更形象地说,监听者模式是基于:注册——回调的事件/消息通知处理模式,就是被监控者将消息通知给所有监控者。
1,注册监听器:事件源。setListener。
2,回调:事件源实现onListener。
下面是一个模仿监听器的演示,需求:实现机器人工作和跳的舞,在机器人开始工作和跳舞之前输出相关提示。
首先创建一个事件源机器人:
包com.ssm.listener.robotListener;/* *
*事件源:机器人
*/公共类机器人{
私人RobotListener侦听器;/* *
*注册机器人监听器
* @param侦听器
*/公共空间有关registerListener (RobotListener侦听器){
这一点。侦听器=侦听器;
}/* *
*工作
*/公共空间工作(){
如果(听众!=null) {
甚至连=new ();
this.listener.working(甚至);
}
System.out.println(“机器人开始工作……”);
}/* *
*跳的舞
*/公共空间跳舞(){
如果(听众!=null) {
甚至连=new ();
this.listener.dancing(甚至);
}
System.out.println(“机器人开始跳舞……”);
}
}
,创建时间对甚至象:
包com.ssm.listener.robotListener;/* *
*事件对象
*/公开课甚至{
私人机器人机器人;
公众甚至(){
超级();
}
公众甚至(机器人机器人){
超级();
这一点。机器人=机器人;
}
公共机器人getRobot () {
返回机器人;
}
公共空间setRobot(机器人机器人){
这一点。机器人=机器人;
}
}
创建时间监听器接口RobotListener:
包com.ssm.listener.robotListener;/* *
*事件监听器
*/公共接口RobotListener {
公共空间工作(甚至连);
公共空间跳舞(甚至);
}
实现事件监听器MyRobotListener:
包com.ssm.listener.robotListener;
公共类MyRobotListener实现RobotListener {
@Override
公共空间工作(甚至连){
机器人机器人=even.getRobot ();
System.out.println(“机器人工作提示:请看管好的你机器人,防止它偷懒!”);
}
@Override
公共空间跳舞(甚至连){
机器人机器人=even.getRobot ();
System.out.println(“机器人跳舞提示:机器人跳舞动作优美,请不要走神哦!”);
}
}
事件监听器测试类
TestListener:
包com.ssm.listener.robotListener;
公开课TestListener {
公共静态void main (String [] args) {
机器人机器人=new ();
机器人。有关registerListener(新MyRobotListener ());
robot.working ();
robot.dancing ();
}
}