介绍 ls /dev/视频* #=utf - 8编码
import RPi.GPIO as GPIO
import cv2
import 时间
import 操作系统
,
GPIO.setmode (GPIO.BCM)
GPIO.OUT GPIO.setup(18日)
,
时间=camera cv2.VideoCapture (0)
if camera is 没有:
,打印(& # 39;please connect 从而相机# 39;)
,退出()
,
时间=fps 30,
时间=pre_frame 没有
,
led =False
,
while 真正的:=,,start time.time ()
,res, cur_frame =, camera.read ()
,if res !=,真的:
,打破
,最终获得=,time.time ()=,seconds ,最终获得成功,开始
,if seconds & lt; 1.0/帧:
,time . sleep (1.0/fps 作用;秒)
,
,cv2.namedWindow (& # 39; img # 39;, 0);
,# cv2.imshow (& # 39; img # 39;,, cur_frame)=,,key cv2.waitKey(30),及0 xff
,if key ==, 27日:
,打破
,=,,gray_img cv2.cvtColor (cur_frame, cv2.COLOR_BGR2GRAY)=,,gray_img cv2.resize (gray_img,, (500,, 500))=,,gray_img cv2.GaussianBlur (gray_img,, (21,, 21), 0)
,
,if pre_frame is 没有:=,pre_frame gray_img
,其他的:=,,img_delta cv2.absdiff (pre_frame, gray_img)=,,thresh cv2.threshold (img_delta, 25岁,255年,cv2.THRESH_BINARY) [1]=,,thresh cv2.dilate(打,,没有,,迭代=2)
,
轮廓的不同之处是,hierarchy =, cv2.findContours (thresh.copy (), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
,for c 轮廓拷贝:
if 才能cv2.contourArea (c), & lt;, 1000:
,继续
其他的才能:
,(x, y, w, h),=, cv2.boundingRect (c)
,cv2.rectangle (cur_frame (x, y) (x + w, y + h) (0255 0), 2)
,
,打印(“something is 移动! ! !“)
led =, True
,if led ==,真的:
,for 小姐:拷贝范围(30):
GPIO.HIGH, GPIO.output(18日)
,time . sleep (0.03)
GPIO.LOW, GPIO.output(18日)
,time . sleep (0.03)
,打破
,
,cv2.imshow (& # 39; img # 39;,, cur_frame),=,pre_frame gray_img
,
camera.release ()
cv2.destroyAllWindows ()
这篇文章主要为大家展示了“树莓派+摄像头如何实现对移动物体的检测”,内容简而易懂,条理清晰,希望能够帮助大家解决疑惑,下面让小编带领大家一起研究并学习一下“树莓派+摄像头如何实现对移动物体的检测”这篇文章吧。
<强>一、环境变量的配置
我们可以参照上一篇文章对我们的树莓派进行环境的配置
当我们将cv2的库安装之后,就可以实现对摄像头的操作
<强>二、摄像头的连接
在此实验中,我使用的为usb摄像头
当我们连接摄像头之后,终端输入
如果终端提示如下:

则表示摄像头连接成功
<强>三、编码实现对移动物体的检测
使用python编写程序,实现对移动物体的检测,代码如下
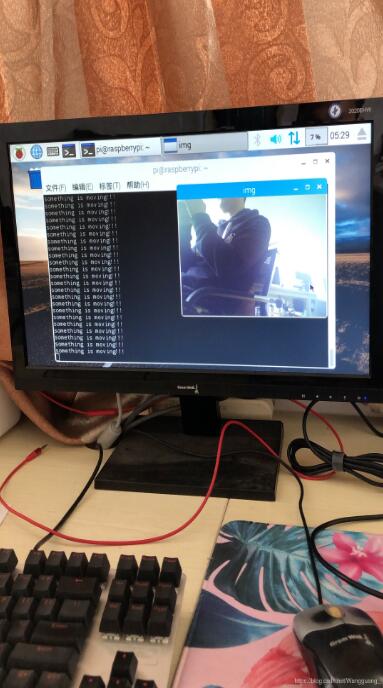
我的树莓派终端不能显示中文,因此会出现乱码
Ubuntu下的运行结果如下
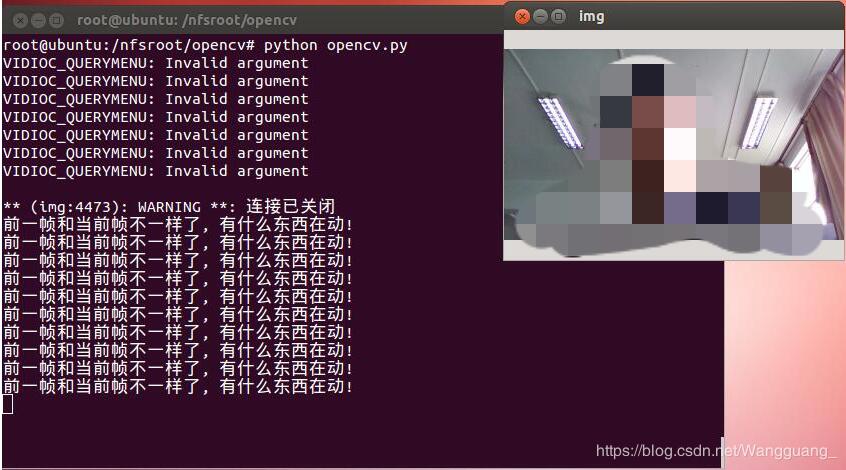
树莓派下执行结果如下:
以上是“树莓派+摄像头如何实现对移动物体的检测”这篇文章的所有内容,感谢各位的阅读!相信大家都有了一定的了解,希望分享的内容对大家有所帮助,如果还想学习更多知识,欢迎关注行业资讯频道!