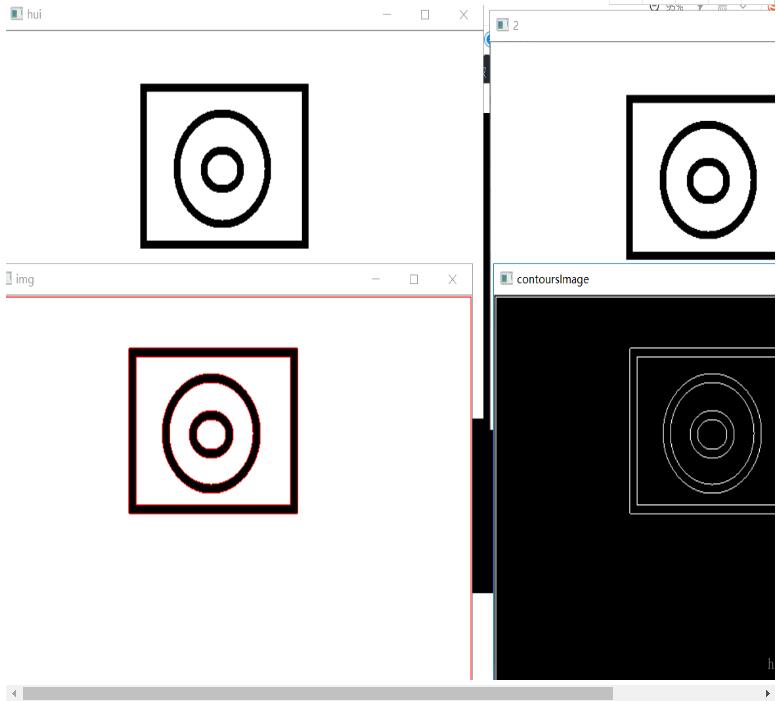
本文实例为大家分享了Opencv处理图像之轮廓提取,使用cvfindContours对图像进行轮廓检测,供大家参考,具体内容如下
# include
# include
# include
int main ()
{
IplImage * img=cvLoadImage (“E: \ \ test.bmp ", 0);
IplImage * imgColor=cvCreateImage (cvGetSize (img), 8日,3);
IplImage * contoursImage=cvCreateImage (cvSize (img→宽度,img→高度),8日,1);
cvNamedWindow(“回族”);
cvShowImage(“回族”,img);
cvThreshold (img, img, 100255年,CV_THRESH_BINARY);//二值化图像以100为阀值
cvNamedWindow (“2”);
cvShowImage (“2”, img);
CvSeq *轮廓=0,* contoursTemp=0;
cvZero (contoursImage);
cvCvtColor (img imgColor CV_GRAY2BGR);//颜色转化函数//img:需要提前的图片需要二值//存储:存放的空间//轮廓:指向轮廓提取的第一个轮廓//运算符(CvContour):采用的是哪一种结构以及大?/CV_RETR_LIST:轮廓存储方式//CV_CHAIN_APPROX_NONE:采用坐标集表示轮廓
CvMemStorage *存储=cvCreateMemStorage (0);
int总=cvFindContours (img、存储和轮廓,sizeof (CvContour) CV_RETR_LIST, CV_CHAIN_APPROX_NONE, cvPoint (0, 0));
printf (" % d”,总);//输出总的轮廓数
contoursTemp=轮廓;
而(contoursTemp !=0) {
(int i=0; i< contoursTemp→总,我+ +){
CvPoint * pt=(CvPoint *) cvGetSeqElem (contoursTemp,我);
cvSetReal2D (contoursImage pt→y, pt→x 255.0);
cvSet2D (imgColor pt→y, pt→x, cvScalar (0, 0255 .0));
}
contoursTemp=contoursTemp→h_next;
}
cvNamedWindow (img);
cvShowImage (img, imgColor);
cvNamedWindow (“contoursImage”);
cvShowImage (“contoursImage”, contoursImage);
cvWaitKey (0);
返回0;
}
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持。